籃框移動控制 <<
Previous Next >> 導入w16的機械手臂
程式
function sysCall_init()
-- do some initialization here
joint=sim.getObjectHandle('Revolute_joint')--定義軸跟四條感測器
proximity = sim.getObjectHandle("Proximity_sensor")--
proximity0 = sim.getObjectHandle("Proximity_sensor0")--
proximity1 = sim.getObjectHandle("Proximity_sensor1")--
proximity2 = sim.getObjectHandle("Proximity_sensor2")--
ball = sim.getObjectHandle("ball")
ball2 = sim.getObjectHandle("Sphere")
boallDummy = sim.getObjectHandle("Dummy")
--sim.sJointTargetVelocity(joint,5.5)
axis3=sim.getObjectHandle('slide')
distance3 = 0
number=-16
a = 0
--print(auxiliaryData[1])
--if (auxiliaryData[1]==string.byte(' ')) then
end
function sysCall_actuation()
--定義四根感測器的名稱
local res = sim.readProximitySensor(proximity)
local res0 = sim.readProximitySensor(proximity0)
local res2 = sim.readProximitySensor(proximity2)
local res1 = sim.readProximitySensor(proximity1)
--當球經過四條感測器,只要其中一條的值為1對a初始值進行運算
if res == 1 or res0 == 1 or res1 == 1 or res2 == 1 then
a = a+1
print(a)--同時顯示出a現在的值
end
message,auxiliaryData=sim.getSimulatorMessage()
if (message==sim.message_keypress) then
if (auxiliaryData[1]==2007) then--按下方向鍵上,擊球桿的主動軸順時針旋轉
sim.setJointTargetVelocity(joint,number)
end
if (auxiliaryData[1]==32) then--按下空白建,擊球桿的主動軸速度為0
sim.setJointTargetVelocity(joint,0)
end
if (auxiliaryData[1]==2008) then--按下方向鍵下,擊球桿的主動軸逆時針旋轉且速度為1
sim.setJointTargetVelocity(joint,1)
end
if (auxiliaryData[1]==114) then --r/重新添加球
local insertedObjects = sim.copyPasteObjects({ball,ball2,ballDummy},0)
-- local disturbedCoordinates = {-2,0.02,4}
-- local disturbedCoordinates = {1,0,1}
local disturbedCoordinates = {4,-2.35,1.5}
sim.setObjectPosition(insertedObjects[1],-1,disturbedCoordinates)
end
end
end
function sysCall_sensing()
-- put your sensing code here
end
function sysCall_cleanup()
-- do some clean-up here
end
-- See the user manual or the available code snippets for additional callback functions and details
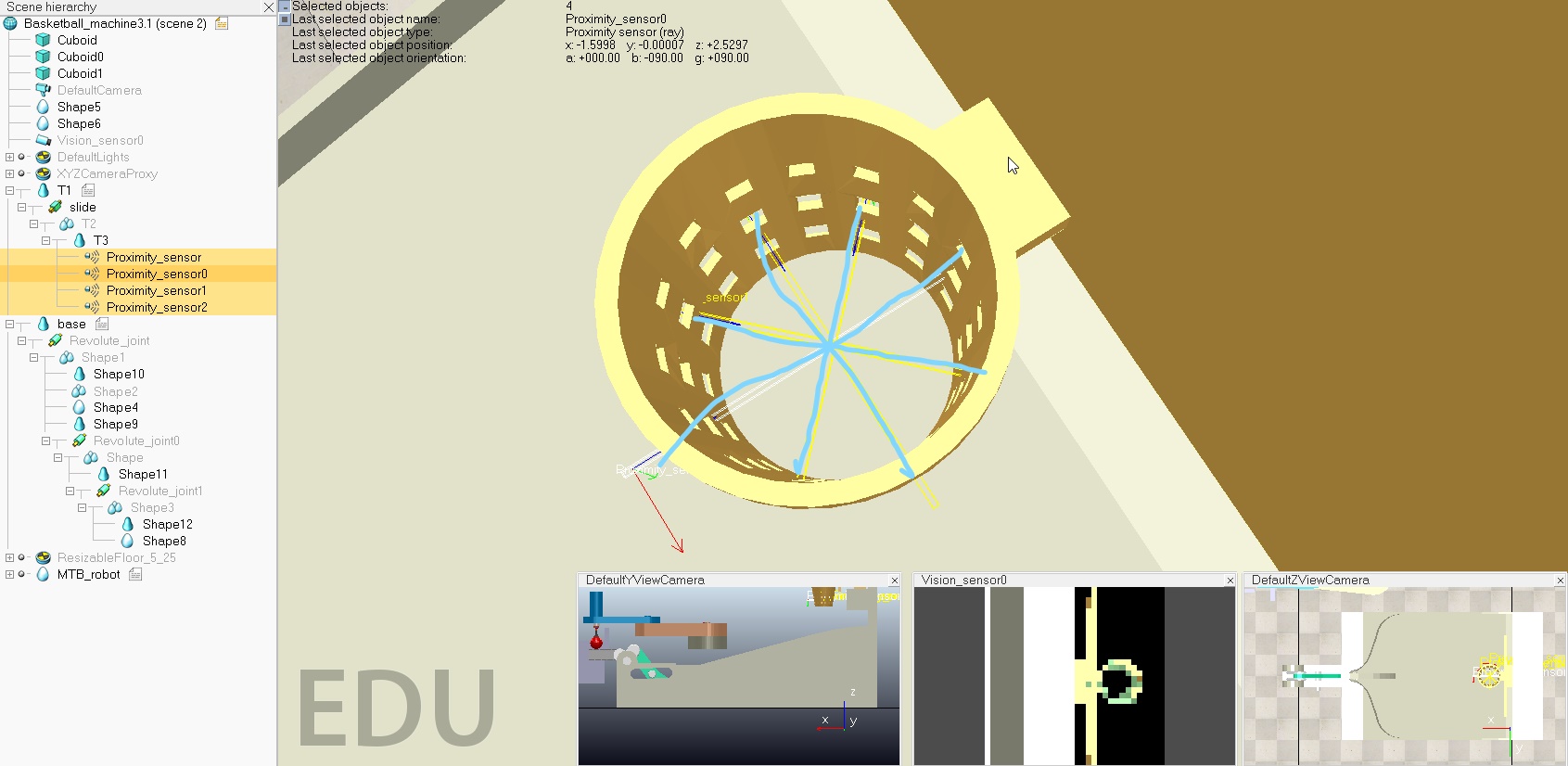
四條感應器的擺法
籃框移動控制 <<
Previous Next >> 導入w16的機械手臂