2.Basketball machine Slider <<
Previous 3.Basketball machine by (MTB_Robot)
使用老師的ik程式,使Mtb_robot放球到最終的位置(x=1.002,y=0)
但是把MTB_robot放到籃球機的場景裡,不能直接在程式裡打ik(1.002,0),因為MTB_robot沒有在座標原點上,所以要減掉MTB_robot的座標(0.7496,-2.3502),得出(0.2506,2.3502),才會移動到正確的座標。
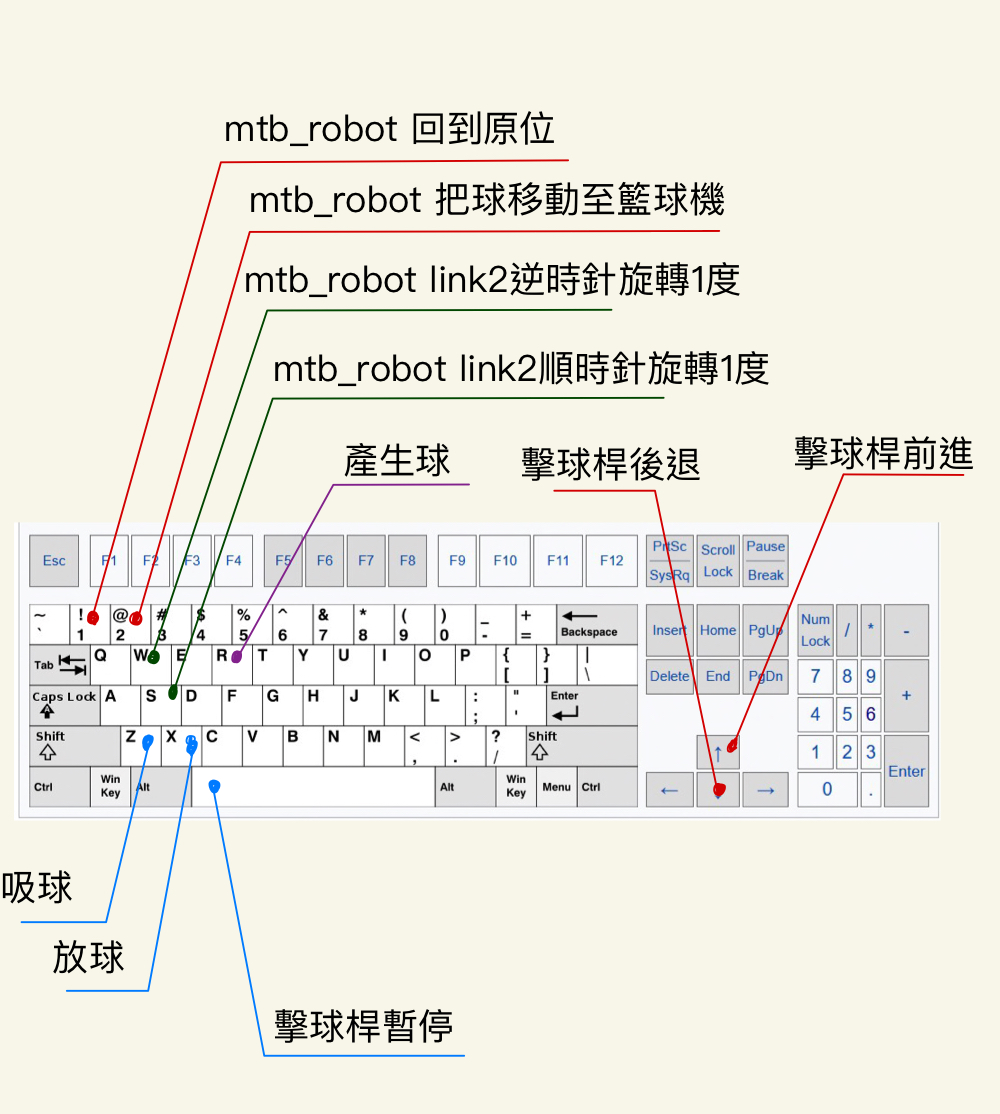
操作說明
鍵盤操作
2.Basketball machine Slider <<
Previous